除法器顾名思义,用来做除法运算。

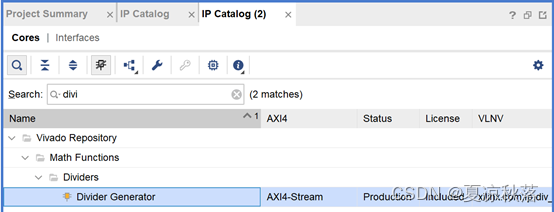
(1)在ip catalog里面选择Divders
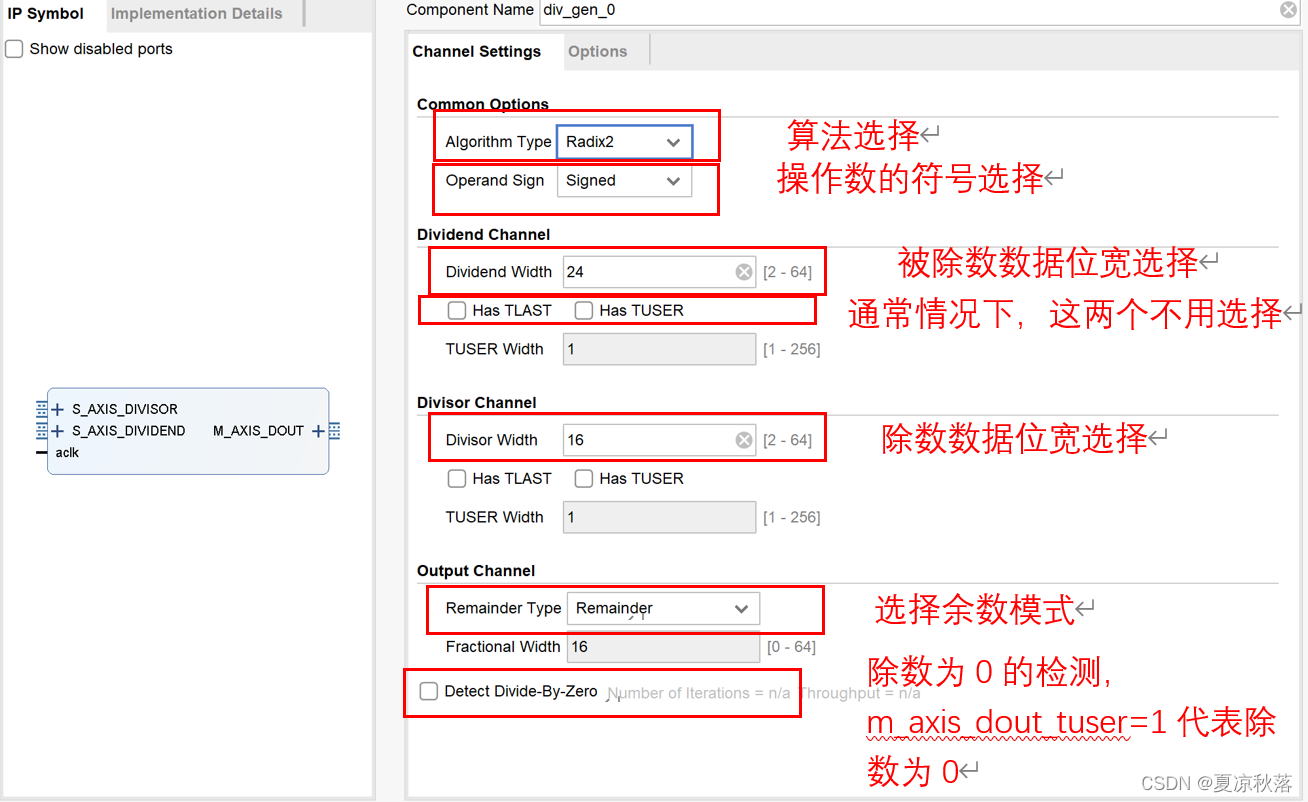
(2)channel setting,具体如下所述:
Algorithm type: 选择不同的算法模式,其中Radix2为常用的模式(位宽12到16时优先考虑),LutMult当时数较小的时候使用(数据宽度小于等于12时,优先考虑),High Radix是当数很大的时候使用(数据位宽大于16时)。常用的是Radix2。
Dividend Width:被除数的位数。
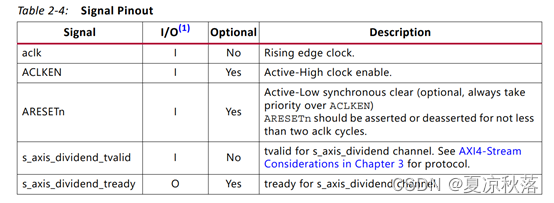
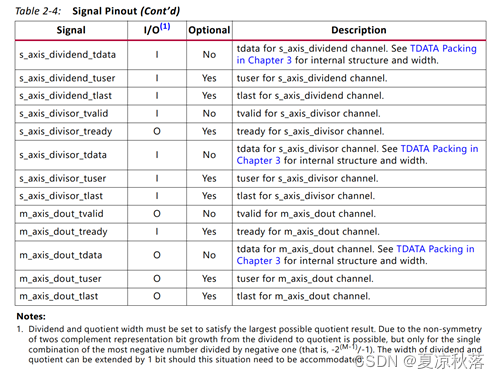
Has TLAST: 指定此通道是否具有 tlast 端口。 除法器不使用此信息。 该项用于简化系统设计。tlast信息以和数据路径相同的延迟传送到输出通道。
Has TUSER: 指定此通道是否具有 tuser 端口。 与 tlast 一样, 除法器不使用此信息。 该项用于简化系统设计。 tuser 位以和数据路径相同的延迟传送到输出。
TUSER Width: 当 Has tuser 为 TRUE 时可用,这将设置此通道的 tuser 端口的宽度。
Divisor Width:除数的位数。
Remainder Type:选择余数的模式。
有两种模式:Remainder:余数,以及Fractional分数模式。
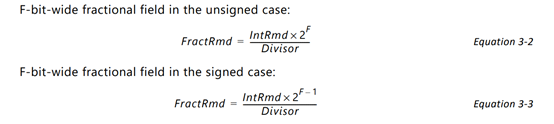
Remainder模式的余数模式位数固定,由系统根据除数自动设定。,计算公式为

比如:6/-4 = -1 REMD 2 -6/4 = -1 REMD –2。 其中商的位宽和被除数的位宽一致,位于高位,余数的位宽和除数的位宽一致,位于低位。
而选择Fractional Width(f分数模式)模式,则可以在Fractional Width那一栏选择自己想要的余数位数。对于带分数输出的带符号模式,符号位同时存在于商和分数域中。例如,对于一个5位被除数、除数和分数输出:
-9/4 = 9/-4 = -(2 1/4),对应的为10111/00100 or 01001/11100,其结果为
Quotient(商) = 11110 (= -2)
Remainder (余数)= 11100 (= -1/4)
常用模式为Remainder模式。本文也应选则Remainder模式。
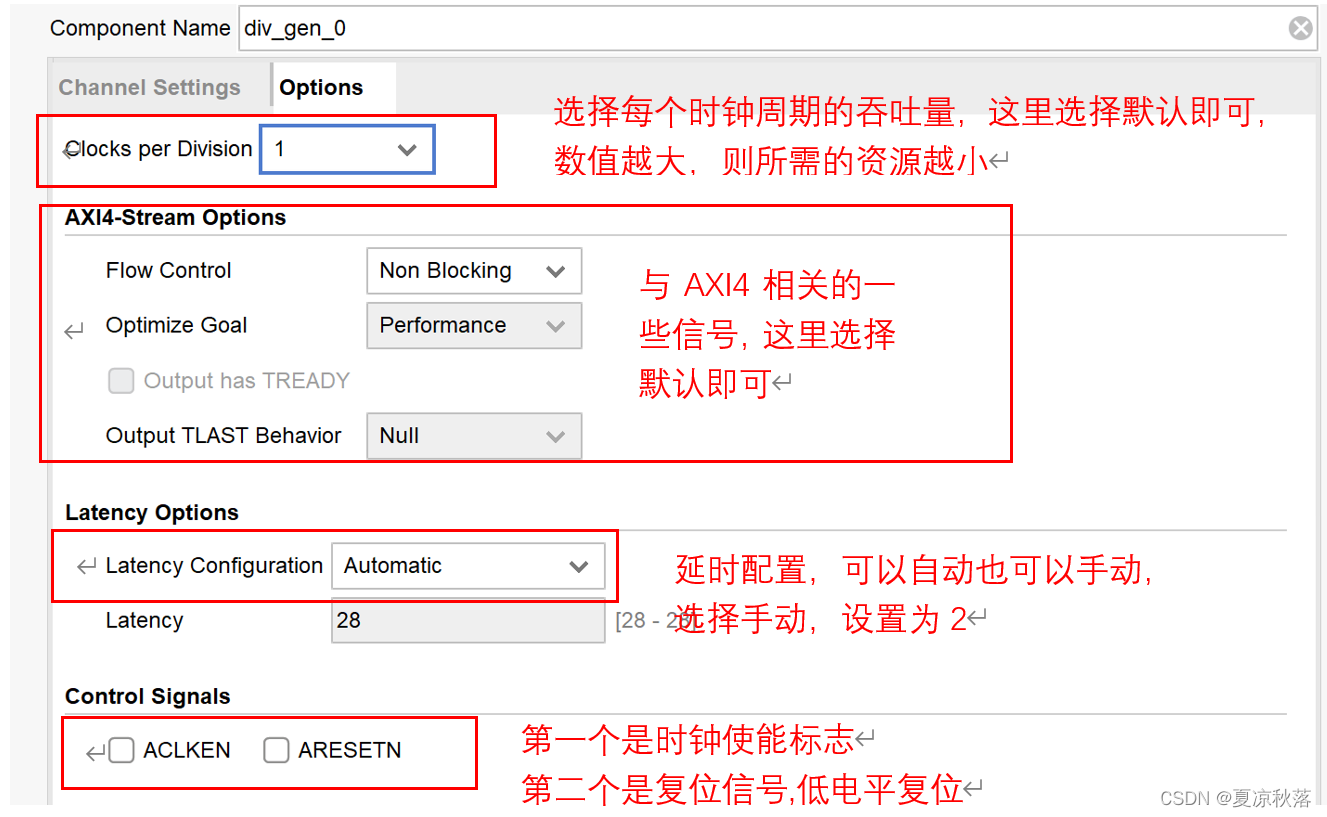
(3)option的设置,具体如下所述:
ACLKEN :确定内核是否具有时钟使能输入 (ACLKEN)。信号ARESETn始终优先于ACLKEN,即无论ACLKEN的状态如何,ARESETn都生效。
ARESETn :确定内核是否具有低电平有效同步清零输入 (ARESETn)。为低电平有效。信号 ARESETn 应保持有效至少两个时钟周期。 这是因为,为了性能,ARESETn 在被馈送到原语的重置端口之前在内部注册。
`timescale 1ns / 1ps
//
// Company:
// Engineer:
//
// Create Date: 2022/01/16 15:00:44
// Design Name:
// Module Name: divider_tb
// Project Name:
// Target Devices:
// Tool Versions:
// Description:
//
// Dependencies:
//
// Revision:
// Revision 0.01 - File Created
// Additional Comments:
//
//module divider_tb();reg aclk;reg s_axis_divisor_tvalid;reg [15:0] s_axis_divisor_tdata;reg [23:0] s_axis_dividend_tdata;reg s_axis_dividend_tvalid; wire m_axis_dout_tuser;wire m_axis_dout_tvalid;wire [39:0] m_axis_dout_tdata;wire [23:0] quoeitnt; //除数wire [15:0] intrmd ; //余数assign quoeitnt = m_axis_dout_tdata[39:16];assign intrmd = m_axis_dout_tdatac[15:0];div_gen_0 div_gen_0_inst0 (.aclk(aclk), // input wire aclk.s_axis_divisor_tvalid(s_axis_divisor_tvalid), // input wire s_axis_divisor_tvalid.s_axis_divisor_tdata(s_axis_divisor_tdata), // input wire [15 : 0] s_axis_divisor_tdata.s_axis_dividend_tvalid(s_axis_dividend_tvalid), // input wire s_axis_dividend_tvalid.s_axis_dividend_tdata(s_axis_dividend_tdata), // input wire [23 : 0] s_axis_dividend_tdata.m_axis_dout_tvalid(m_axis_dout_tvalid), // output wire m_axis_dout_tvalid.m_axis_dout_tuser(m_axis_dout_tuser), // output wire [0 : 0] m_axis_dout_tuser.m_axis_dout_tdata(m_axis_dout_tdata) // output wire [39 : 0] m_axis_dout_tdata
);initial aclk=1;
always #5 aclk=~aclk;initial begins_axis_dividend_tvalid=0;s_axis_divisor_tvalid =0;#20;s_axis_dividend_tdata = 24'd6;s_axis_divisor_tdata = 16'd4;s_axis_dividend_tvalid=1;s_axis_divisor_tvalid =1;#50;s_axis_divisor_tdata = 16'd0;
endendmodule
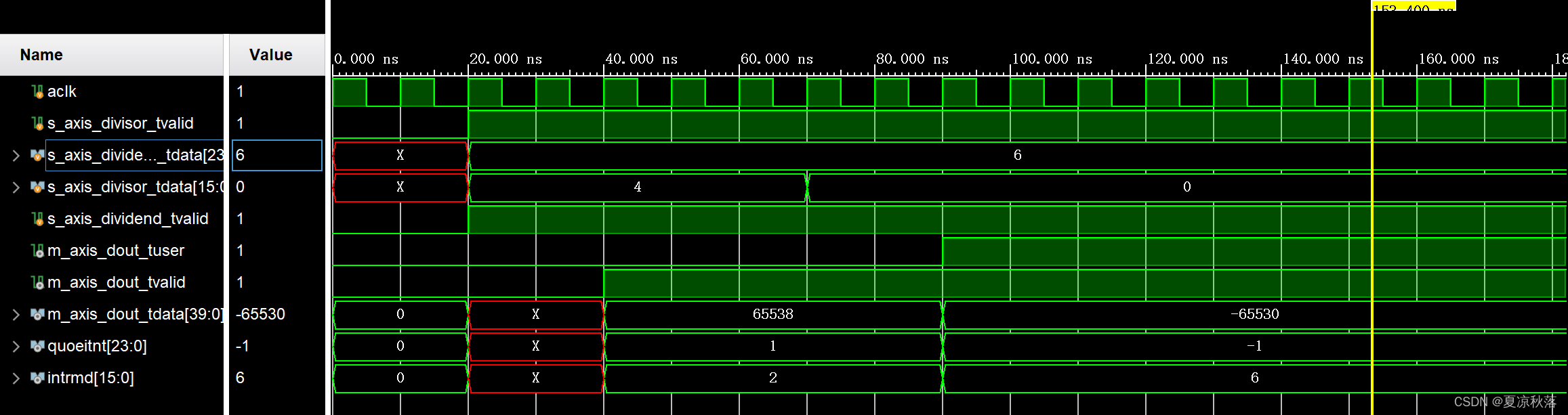
从图中可以看出,输出m_axis_dout_tdata滞后于输入2个时钟周期,这与ip核设置的一致,当除数位0时,发现m_axis_dout_tuser信号拉高,说明输入的除数为0,此时输出结果无效。
[1]数字信号处理-04- FPGA常用运算模块-除法器
[2]vivado 除法器ip核的使用
版权声明:本站所有资料均为网友推荐收集整理而来,仅供学习和研究交流使用。

工作时间:8:00-18:00
客服电话
电子邮件
admin@qq.com
扫码二维码
获取最新动态