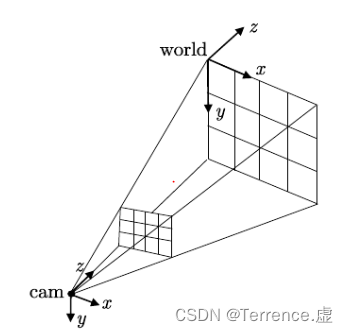
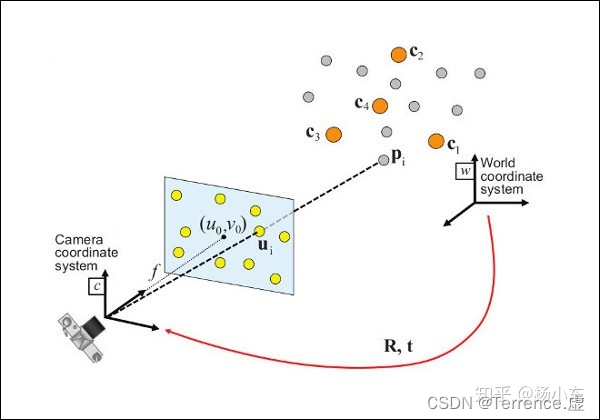
Perspective-n-Point (PnP) 问题:如下图,
1)给定 [公式] 个3D参考点 [公式] 到摄像机图像上2D投影点 [公式] 的匹配点对;
2)已知 3D点在世界坐标系下的坐标,2D点在图像坐标系下的坐标;
3)已知摄像机的内参数 [公式] 。
目的:求世界坐标系与摄像机坐标系之间的位姿变换 [公式]
用途:相机位姿跟踪,物体位姿跟踪,AR/VR,机器人操作,SLAM中位姿初值求解……
常用解法:DLT,P3P,EPnP,UPnP。
PnP算法分为直接发和优化法两大类,
直接法包括:P3P、 DLT 、 EPnP等等;
优化法有: LHM 、 Only pos BA 等。
3D参考点在世界坐标系的齐次坐标:
c=[xyz1]\mathbf{c}=\left[\begin{array}{l}x \\ y \\ z \\ 1\end{array}\right]c=⎣⎢⎢⎡xyz1⎦⎥⎥⎤
对应的2D投影点在图像坐标系下的齐次坐标是:
u=[uv1]\mathbf{u}=\left[\begin{array}{l}u \\ v \\ 1\end{array}\right]u=⎣⎡uv1⎦⎤
相机内参一般是已知的 slam’问题里
K=[fxcxfycy1]\mathbf{K}=\left[\begin{array}{ccc}f_{x} & & c_{x} \\ & f_{y} & c_{y} \\ & & 1\end{array}\right]K=⎣⎡fxfycxcy1⎦⎤
那么3D点到2D点投影可表示为
λ[uv1]=[fxcxfycy1][R∣t][xyz1]\lambda\left[\begin{array}{l}u \\ v \\ 1\end{array}\right]=\left[\begin{array}{lll}f_{x} & & c_{x} \\ & f_{y} & c_{y} \\ & & 1\end{array}\right][\mathbf{R} \mid \mathbf{t}]\left[\begin{array}{c}x \\ y \\ z \\ 1\end{array}\right]λ⎣⎡uv1⎦⎤=⎣⎡fxfycxcy1⎦⎤[R∣t]⎣⎢⎢⎡xyz1⎦⎥⎥⎤ (1)
[R∣t][\mathbf{R} \mid \mathbf{t}][R∣t] 是一个3x4的增广矩阵,包含了旋转和平移信息。
理论上由于 [R][\mathbf{R}][R]这个玩意儿就只有三个自由度,因为存在旋转矩阵的正交约束,DLT算法中先不管这个,忽略这个正交约束,按照[R∣t][\mathbf{R} \mid \mathbf{t}][R∣t]有12个未知参数x=[a1,⋯,a12]T\mathbf{x}=\left[a_{1}, \cdots, a_{12}\right]^{T}x=[a1,⋯,a12]T来考虑计算。
这样,(1)式变化为:
λ=[uv1]=[fxcxfycy1][a1a2a3a4a5a6a7a8a9a10a11a12][xyz1]\lambda=\left[\begin{array}{l}u \\ v \\ 1\end{array}\right]=\left[\begin{array}{ccc}f_{x} & & c_{x} \\ & f_{y} & c_{y} \\ & & 1\end{array}\right]\left[\begin{array}{cccc}a_{1} & a_{2} & a_{3} & a_{4} \\ a_{5} & a_{6} & a_{7} & a_{8} \\ a_{9} & a_{10} & a_{11} & a_{12}\end{array}\right]\left[\begin{array}{l}x \\ y \\ z \\ 1\end{array}\right]λ=⎣⎡uv1⎦⎤=⎣⎡fxfycxcy1⎦⎤⎣⎡a1a5a9a2a6a10a3a7a11a4a8a12⎦⎤⎣⎢⎢⎡xyz1⎦⎥⎥⎤ (2)
先消去第三个等式,也就是消去scale factor尺度因子λ\lambdaλ ,
有:
{xfxa1+xcxa9+yfxa2+ycxa10+zfxa3+zcxa11+fxa4+cxa12−uxa9−uya10−uza11−ua12=0xfya5+xcya9+yfya6+ycya10+zfya7+zcya11+fya8+cya12−vxa9−vya10−vza11−va12=0\left\{\begin{array}{l}x f_{x} a_{1}+x c_{x} a_{9}+y f_{x} a_{2}+y c_{x} a_{10}+z f_{x} a_{3}+z c_{x} a_{11}+f_{x} a_{4}+c_{x} a_{12}-u x a_{9}-u y a_{10}-u z a_{11}-u a_{12}=0 \\ x f_{y} a_{5}+x c_{y} a_{9}+y f_{y} a_{6}+y c_{y} a_{10}+z f_{y} a_{7}+z c_{y} a_{11}+f_{y} a_{8}+c_{y} a_{12}-v x a_{9}-v y a_{10}-v z a_{11}-v a_{12}=0\end{array}\right.{xfxa1+xcxa9+yfxa2+ycxa10+zfxa3+zcxa11+fxa4+cxa12−uxa9−uya10−uza11−ua12=0xfya5+xcya9+yfya6+ycya10+zfya7+zcya11+fya8+cya12−vxa9−vya10−vza11−va12=0
写成矩阵形式如下:
[xfxyfxzfxfx0000xcx−uxycx−uyzcx−uzcx−u0000xfyyfyzfyfyxcy−vxycy−vyzcy−vzcy−v][a1a2⋮a12]=0\left[\begin{array}{cccccccccccc}x f_{x} & y f_{x} & z f_{x} & f_{x} & 0 & 0 & 0 & 0 & x c_{x}-u x & y c_{x}-u y & z c_{x}-u z & c_{x}-u \\ 0 & 0 & 0 & 0 & x f_{y} & y f_{y} & z f_{y} & f_{y} & x c_{y}-v x & y c_{y}-v y & z c_{y}-v z & c_{y}-v\end{array}\right]\left[\begin{array}{c}a_{1} \\ a_{2} \\ \vdots \\ a_{12}\end{array}\right]=0[xfx0yfx0zfx0fx00xfy0yfy0zfy0fyxcx−uxxcy−vxycx−uyycy−vyzcx−uzzcy−vzcx−ucy−v]⎣⎢⎢⎢⎡a1a2⋮a12⎦⎥⎥⎥⎤=0
高翔的14讲 用了简化表示
定义a=[a1a2a3a4a5a6a7a8a9a10a11a12]a=[\begin{array}{cccc}a_{1} & a_{2} & a_{3} & a_{4} \\ a_{5} & a_{6} & a_{7} & a_{8} \\ a_{9} & a_{10} & a_{11} & a_{12}\end{array}]a=[a1a5a9a2a6a10a3a7a11a4a8a12]的三个行向量为:
t⃗1=(a1,a2,a3,a4)T\vec t_{1}=(a_1, a_2,a_3,a_4)^{T}t1=(a1,a2,a3,a4)T
t⃗2=(a5,a6,a7,a8)T\vec t_{2}=(a_5, a_6,a_7,a_8)^{T}t2=(a5,a6,a7,a8)T
t⃗3=(a9,a10,a11,a12)T\vec t_{3}=(a_9, a_{10},a_{11},a_{12})^{T}t3=(a9,a10,a11,a12)T
于是又有:
t⃗1TP−t⃗3TPu1=0,\vec t_{1}^{T}P-\vec t_{3}^{T}Pu_{1}=0 ,t1TP−t3TPu1=0,
t⃗2TP−t⃗3TPv1=0.\vec t_{2}^{T}P-\vec t_{3}^{T}Pv_{1}=0 .t2TP−t3TPv1=0.
综上所述,每个特征点(3D-2D坐标对)提供了两个方程,也就是两个关于t的线性约束。
假设一共有N个特征点,N≥6N \geq 6N≥6 时, 产生一个方程组:
Ax=0\mathrm{Ax}=\mathbf{0} Ax=0
其中, A\mathbf{A}A 的大小为 2n×122 n \times 122n×12 。这个方程无法求出精确解,但是可以获得一个 ∣x∣=1|\mathbf{x}|=1∣x∣=1 约束 下的最小二乘解 argmin∥Ax∥2\operatorname{argmin}\|\mathbf{A x}\|^{2}argmin∥Ax∥2 (这部分可以参考: Ax=0求解以及MVG 教程) 。具体的, 对 A\mathbf{A}A 进行SVD分解,可得
[UΣV]=SVD(A)[\mathbf{U} \mathbf{\Sigma} \mathbf{V}]=\operatorname{SVD}(\mathbf{A}) [UΣV]=SVD(A)
V\mathbf{V}V 矩阵的最后一列 x‾\overline{\mathbf{x}}x, 便为式 (6) 的解。注意,求解的结果是没有尺度的,也就是说实际的解 为
x=βx‾\mathbf{x}=\beta \overline{\mathbf{x}} x=βx
其中, β\betaβ 为比例系数, x‾=[aˉ1,⋯,aˉ12]T\overline{\mathbf{x}}=\left[\bar{a}_{1}, \cdots, \bar{a}_{12}\right]^{T}x=[aˉ1,⋯,aˉ12]T 。旋转部分为
R‾=[aˉ1aˉ2aˉ3aˉ4aˉ5aˉ6aˉ7aˉ8aˉ9]\overline{\mathbf{R}}=\left[\begin{array}{lll} \bar{a}_{1} & \bar{a}_{2} & \bar{a}_{3} \\ \bar{a}_{4} & \bar{a}_{5} & \bar{a}_{6} \\ \bar{a}_{7} & \bar{a}_{8} & \bar{a}_{9} \end{array}\right] R=⎣⎡aˉ1aˉ4aˉ7aˉ2aˉ5aˉ8aˉ3aˉ6aˉ9⎦⎤
为带有尺度的正交矩阵,为求最优的旋转矩阵,将其进行SVD分解
[UΣV]=SVD(R‾)[\mathbf{U} \mathbf{\Sigma} \mathbf{V}]=\operatorname{SVD}(\overline{\mathbf{R}}) [UΣV]=SVD(R)
最优的旋转矩阵即为
R=±UVT(为什么这样?后续证明之)\mathbf{R}=\pm \mathbf{U V}^{T} (为什么这样?后续证明之) R=±UVT(为什么这样?后续证明之)
理论上, Σ\boldsymbol{\Sigma}Σ 的对角线应该非常相近,取均值,求解得到比例系数为
β=±1/(tr(Σ)/3)\beta=\pm 1 /(\operatorname{tr}(\boldsymbol{\Sigma}) / 3) β=±1/(tr(Σ)/3)
在加上一个限制条件,3D点应该在摄像机的前方
λ>0:β(xaˉ9+yaˉ10+zaˉ11+aˉ12)>0\lambda>0: \beta\left(x \bar{a}_{9}+y \bar{a}_{10}+z \bar{a}_{11}+\bar{a}_{12}\right)>0 λ>0:β(xaˉ9+yaˉ10+zaˉ11+aˉ12)>0
可确定 β\betaβ 和 R\mathbf{R}R 的 ±\pm± 符号。接着,可以求得平移向量
t=β[aˉ4,aˉ8,aˉ12]T\mathbf{t}=\beta\left[\bar{a}_{4}, \bar{a}_{8}, \bar{a}_{12}\right]^{T} t=β[aˉ4,aˉ8,aˉ12]T
《视觉14讲》原文:
t矩阵一共有12维,因此最少通过6对匹配的3D-2D特征点即可实现变换矩阵T的线性求解,这种方法就是DLT 直接线性变换法。 当匹配点大于6个时,使用SVD分解对超定方程求最小二乘解。如上述步骤所示。
鉴于在DLT求解过程中,我们忽略了R矩阵的正交约束,用DLT求出的结果不一定满足这个约束,是一个一般性的矩阵,平移向量比较好办,它属于三维向量空间。但是旋转矩阵属于SO(3)旋转流形,必须针对[R∣t][\mathbf{R} \mid \mathbf{t}][R∣t]左边3X3的矩阵块,寻找一个最好的旋转矩阵对他进行近似,可以借助QR分解,如下:
R←(RRT)−12RR\leftarrow(RR^{T})^{-\frac{1}{2}}RR←(RRT)−21R
这就相当于把结果从矩阵空间重新投影到了SE(3)流形上,转换成旋转和平移两部分。
再次说明:通常SLAM问题内参K都是已知的,如果即使未知也可以使用PnP去估计K,R,t三个量。然而由于未知量增多,效果会差一些。
background:
在ICP 问题中,就业涉及到SVD分解球旋转矩阵的问题,这里也遇到了类似的问题,为什么R=±UVT.\mathbf{R}=\pm \mathbf{U V}^{T} .R=±UVT.就是最优的?
计算位移
将(1)式中的R设为不变量对进行求导,同时令 F(t)=(R,t)F(t)=(R, t)F(t)=(R,t) ,对 F(t)F(t)F(t) 求导可得:
0=∂F∂t=∑i=1n2wi(Rpi+t−qi)=0=\frac{\partial F}{\partial \mathbf{t}}=\sum_{i=1}^{n} 2 w_{i}\left(R \mathbf{p}_{i}+\mathbf{t}-\mathbf{q}_{i}\right)=0=∂t∂F=∑i=1n2wi(Rpi+t−qi)=
=2t(∑i=1nwi)+2R(∑i=1nwipi)−2∑i=1nwiqi.=2 \mathrm{t}\left(\sum_{i=1}^{n} w_{i}\right)+2 R\left(\sum_{i=1}^{n} w_{i} \mathbf{p}_{i}\right)-2 \sum_{i=1}^{n} w_{i} \mathbf{q}_{i} .=2t(∑i=1nwi)+2R(∑i=1nwipi)−2∑i=1nwiqi.
p‾=∑i=1nwipi∑i=1nwi\overline{\mathbf{p}}=\frac{\sum_{i=1}^{n} w_{i} \mathbf{p}_{i}}{\sum_{i=1}^{n} w_{i}}p=∑i=1nwi∑i=1nwipi ,
q‾=∑i=1nwiqi∑i=1nwi\quad \overline{\mathbf{q}}=\frac{\sum_{i=1}^{n} w_{i} \mathbf{q}_{i}}{\sum_{i=1}^{n} w_{i}}q=∑i=1nwi∑i=1nwiqi
t=q‾−Rp‾\mathbf{t}=\overline{\mathbf{q}}-R \overline{\mathbf{p}}t=q−Rp
在将(4)式代入(1)式可得:
∑i=1nwi∥(Rpi+t)−qi∥2=∑i=1nwi∥Rpi+q‾−Rp‾−qi∥2==∑i=1nwi∥R(pi−p‾)−(qi−q‾)∥2xi:=pi−p‾,yi:=qi−q‾.——去质心坐标R=argminR∑i=1nwi∥Rxi−yi∥2\begin{aligned} \sum_{i=1}^{n} w_{i}\left\|\left(R \mathbf{p}_{i}+\mathbf{t}\right)-\mathbf{q}_{i}\right\|^{2} &=\sum_{i=1}^{n} w_{i}\left\|R \mathbf{p}_{i}+\overline{\mathbf{q}}-R \overline{\mathbf{p}}-\mathbf{q}_{i}\right\|^{2}=\\ &=\sum_{i=1}^{n} w_{i}\left\|R\left(\mathbf{p}_{i}-\overline{\mathbf{p}}\right)-\left(\mathbf{q}_{i}-\overline{\mathbf{q}}\right)\right\|^{2} \\ \mathbf{x}_{i}:=\mathbf{p}_{i}-\overline{\mathbf{p}}, \quad \mathbf{y}_{i}:=& \mathbf{q}_{i}-\overline{\mathbf{q}} . —— 去质心坐标\\ R=\underset{R}{\operatorname{argmin}} \sum_{i=1}^{n} w_{i}\left\|R \mathbf{x}_{i}-\mathbf{y}_{i}\right\|^{2} \end{aligned} i=1∑nwi∥(Rpi+t)−qi∥2xi:=pi−p,yi:=R=Rargmini=1∑nwi∥Rxi−yi∥2=i=1∑nwi∥Rpi+q−Rp−qi∥2==i=1∑nwi∥R(pi−p)−(qi−q)∥2qi−q.——去质心坐标
从上可以看出,问题经过转化后变得更加简单,对原来的点集做一个减中心点的预处理,然后再求两个最小二乘的旋转量。
计算旋转量
将(8)式用矩阵表示形式展开,可得:
∥Rxi−yi∥2=(Rxi−yi)T(Rxi−yi)=(xiTRT−yiT)(Rxi−yi)==xiTRTRxi−yiTRxi−xiTRTyi+yiTyi==xiTxi−yiTRxi−xiTRTyi+yiTyi.\begin{aligned} \left\|R \mathbf{x}_{i}-\mathbf{y}_{i}\right\|^{2} &=\left(R \mathbf{x}_{i}-\mathbf{y}_{i}\right)^{T}\left(R \mathbf{x}_{i}-\mathbf{y}_{i}\right)=\left(\mathbf{x}_{i}^{T} R^{T}-\mathbf{y}_{i}^{T}\right)\left(R \mathbf{x}_{i}-\mathbf{y}_{i}\right)=\\ &=\mathbf{x}_{i}^{T} R^{T} R \mathbf{x}_{i}-\mathbf{y}_{i}^{T} R \mathbf{x}_{i}-\mathbf{x}_{i}^{T} R^{T} \mathbf{y}_{i}+\mathbf{y}_{i}^{T} \mathbf{y}_{i}=\\ &=\mathbf{x}_{i}^{T} \mathbf{x}_{i}-\mathbf{y}_{i}^{T} R \mathbf{x}_{i}-\mathbf{x}_{i}^{T} R^{T} \mathbf{y}_{i}+\mathbf{y}_{i}^{T} \mathbf{y}_{i} . \end{aligned} ∥Rxi−yi∥2=(Rxi−yi)T(Rxi−yi)=(xiTRT−yiT)(Rxi−yi)==xiTRTRxi−yiTRxi−xiTRTyi+yiTyi==xiTxi−yiTRxi−xiTRTyi+yiTyi.
(由于旋转矩阵 RRR 是正交矩阵,因而有 RR⊤=1R R^{\top}=1RR⊤=1 )。同时可以知道上式中 y⊤Rxx⊤y^{\top} R x x^{\top}y⊤Rxx⊤ 和 xi⊤R⊤yx i^{\top} R^{\top} yxi⊤R⊤y 都是标量,而一个标量的转置仍然等于标量本身,因而有:
xiTRTyi=(xiTRTyi)T=yiTRxi∥Rxi−yi∥2=xiTxi−2yiTRxi+yiTyi\begin{aligned} &\mathbf{x}_{i}^{T} R^{T} \mathbf{y}_{i}=\left(\mathbf{x}_{i}^{T} R^{T} \mathbf{y}_{i}\right)^{T}=\mathbf{y}_{i}^{T} R \mathbf{x}_{i} \\ &\left\|R \mathbf{x}_{i}-\mathbf{y}_{i}\right\|^{2}=\mathbf{x}_{i}^{T} \mathbf{x}_{i}-2 \mathbf{y}_{i}^{T} R \mathbf{x}_{i}+\mathbf{y}_{i}^{T} \mathbf{y}_{i} \end{aligned} xiTRTyi=(xiTRTyi)T=yiTRxi∥Rxi−yi∥2=xiTxi−2yiTRxi+yiTyi
现在变成要求(11)式的最小值,而该式中只有一项与R有关,其他两项(xi xix ixi i和 yi⊤yiy i^{\top} y iyi⊤yi 都是常量,所以问题转换为求其中一项可变量的最小值,即
argminR(−2∑i=1nwiyiTRxi).argminR(−2∑i=1nwiyiTRxi)=argmaxR∑i=1nwiyiTRxi.\begin{aligned} &\underset{R}{\operatorname{argmin}}\left(-2 \sum_{i=1}^{n} w_{i} \mathbf{y}_{i}^{T} R \mathbf{x}_{i}\right) . \\ &\underset{R}{\operatorname{argmin}}\left(-2 \sum_{i=1}^{n} w_{i} \mathbf{y}_{i}^{T} R \mathbf{x}_{i}\right)=\underset{R}{\operatorname{argmax}} \sum_{i=1}^{n} w_{i} \mathbf{y}_{i}^{T} R \mathbf{x}_{i} . \end{aligned} Rargmin(−2i=1∑nwiyiTRxi).Rargmin(−2i=1∑nwiyiTRxi)=Rargmaxi=1∑nwiyiTRxi.
∑i=1nwiyiTRxi=tr(WYTRX)\sum_{i=1}^{n} w_{i} \mathbf{y}_{i}^{T} R \mathbf{x}_{i}=\operatorname{tr}\left(W Y^{T} R X\right)∑i=1nwiyiTRxi=tr(WYTRX)
上式中的转换是将标量累加转换成矩阵相乘,其中W是 n×nn \times nn×n 的对角矩阵,X和Y是 3×n3 \times n3×n 的矩阵,这些矩阵相乘后的迹就等于等式左边的值。同时,对于 矩阵的迹,有如下变换关系:
tr(AB)=tr(BA)\operatorname{tr}(A B)=\operatorname{tr}(B A) tr(AB)=tr(BA)
tr(WYTRX)=tr((WYT)(RX))=tr(RXWYT)t r\left(W Y^{T} R X\right)=\operatorname{tr}\left(\left(W Y^{T}\right)(R X)\right)=\operatorname{tr}\left(R X W Y^{T}\right) tr(WYTRX)=tr((WYT)(RX))=tr(RXWYT)
S=XXVY⊤,svd(S)==⇒S=UΣVT.\mathrm{S}=X \mathrm{XV} Y^{\top}, \operatorname{svd}(\mathrm{S})==\Rightarrow S=U \Sigma V^{T} . S=XXVY⊤,svd(S)==⇒S=UΣVT.
tr(RXWYT)=tr(RS)=tr(RUΣVT)=tr(ΣVTRU)\operatorname{tr}\left(R X W Y^{T}\right)=\operatorname{tr}(R S)=\operatorname{tr}\left(R U \Sigma V^{T}\right)=\operatorname{tr}\left(\Sigma V^{T} R U\right) tr(RXWYT)=tr(RS)=tr(RUΣVT)=tr(ΣVTRU)
(18)式中最后一步的变换也用到了(15)式的性质。由于 U、R、VU 、 R 、 VU、R、V 都是正交矩阵,那么 M=V⊤RUM=V^{\top} R UM=V⊤RU 也是正交矩阵。
1=mjTmj=∑i=1dmij2⇒mij≤1⇒∣mij∣<11=\mathbf{m}_{j}^{T} \mathbf{m}_{j}=\sum_{i=1}^{d} m_{i j}^{2} \Rightarrow m_{i j} \leq 1 \Rightarrow\left|m_{i j}\right|<1 1=mjTmj=i=1∑dmij2⇒mij≤1⇒∣mij∣<1
tr(ΣM)=(σ1σ2⋱σd)(m11m12…m1dm21m22…m2d⋮⋮⋮⋮md1md2…mdd)=∑i=1dσimii≤∑i=1dσi\operatorname{tr}(\Sigma M)=\left(\begin{array}{lllll} \sigma_{1} & & & & \\ & \sigma_{2} & & \\ & & \ddots & \\ & & & \sigma_{d} \end{array}\right)\left(\begin{array}{ccccc} m_{11} & m_{12} & \ldots & m_{1 d} \\ m_{21} & m_{22} & \ldots & m_{2 d} \\ \vdots & \vdots & \vdots & \vdots \\ m_{d 1} & m_{d 2} & \ldots & m_{d d} \end{array}\right)=\sum_{i=1}^{d} \sigma_{i} m_{i i} \leq \sum_{i=1}^{d} \sigma_{i} tr(ΣM)=⎝⎜⎜⎛σ1σ2⋱σd⎠⎟⎟⎞⎝⎜⎜⎜⎛m11m21⋮md1m12m22⋮md2……⋮…m1dm2d⋮mdd⎠⎟⎟⎟⎞=i=1∑dσimii≤i=1∑dσi
由上述两式可以知道,要求最大迹,就必须使得miim_{ii}mii的值等于1,而M又是正交矩阵,那么M就必然是单位矩阵,即有
I=M=V⊤RU⇒V=RU⇒R=VUTI=M=V^{\top} R U \Rightarrow V=R U \Rightarrow R=V U^{T}I=M=V⊤RU⇒V=RU⇒R=VUT
该段证明来自:链接: link.
版权声明:本站所有资料均为网友推荐收集整理而来,仅供学习和研究交流使用。

工作时间:8:00-18:00
客服电话
电子邮件
admin@qq.com
扫码二维码
获取最新动态